
An autonomous vehicle is a car that is able to operate independently from a human, safety driver. In the current autonomous vehicle technology, a safety driver rides in the drivers’ seat so that that he or she can take over control when there are unexpected situations. The safety of autonomous vehicle is measured by its ability to make correct, independent decisions while driving on public roads. To make independent driving decisions, an autonomous vehicle relies on a network of computers instead of a human driver. The network of computers relies on sensors such as cameras, lasers and radar to perceive the environment accurately.
Some of the first autonomous vehicles to be designed were VaMP and VITA II. They used cameras to navigate urban environments in Germany. After the development of VaMP and VITA II, American researchers further developed autonomous vehicle technology because of opportunities such as DARPA (Defense Advanced Research Projects Agency) Grand Challenge and Google’s research program. The DARPA Grand Challenge was a series of racing competitions in which DARPA awarded the teams that could design the safest and fastest autonomous vehicles. Google, through its research program, seeks to achieve the same goal of designing the safest and fastest autonomous vehicle.
Results from the DARPA Grand Challenge and Google’s research program imply that autonomous vehicles can safely navigate in deserts and urban environments with little or no help from a safety driver. To safely navigate in their environment, autonomous vehicles use their ability to (1) detect obstacles and road shapes, (2) merge into lanes, (3) communicate with other vehicles and (4) follow electronic drivers’ manuals.
Safety features of autonomous vehicles make autonomous vehicles safer than human drivers. In addition, autonomous vehicles are not prone to the major causes of road accidents such as alcohol intoxication, cellphone distractions and intentional over-speeding. As a result, if people ride autonomous vehicles, the number of accidents will significantly decrease. The use of autonomous vehicles has already been legalized in Nevada and it will not long before many people use them.
| Table of Contents | ||
| Executive Summary | ii | |
| Table of Contents | iii | |
| List of Definitions | iv | |
| List of Initialisms and Acronyms | v | |
| 1 | Introduction | 1 |
| 1.2 | Scope | 1 |
| 1.3 | Basic Design of an Autonomous Vehicle | 1 |
| 2 | The development of Autonomous vehicles | 2 |
| 2.1 | Introduction | 2 |
| 2.2 | Early Autonomous Vehicles: VaMP and VITA II | 2 |
| 2.3 | Autonomous Vehicles in DARPA Grand Challenge Races | 3 |
| 2.4 | Google’s Autonomous Vehicle Fleet | 4 |
| 3 | Safety Features in Autonomous Vehicles | 4 |
| 3.1 | Introduction | 4 |
| 3.2 | Vision Using 3-Dimensional Cameras in Autonomous Vehicles | 4 |
| 3.3 | Obstacle Detection Using Scanning Lasers in Autonomous Vehicles |
5 |
| 3.3 | Autonomous Lane Merging in Autonomous Vehicles | 5 |
| 3.5 | Vehicle-to-Vehicle Communication in Autonomous Vehicles | 5 |
| 3.6 | Integrated Drivers’ Manual in Autonomous Vehicles | 5 |
| 4 | Comparison of Safety of Human Driving and Autonomous Driving |
6 |
| 4.1 | Ways that Human Drivers Cause Road Traffic Accidents | 6 |
| 4.1.1 | The Role of Intoxicated Human Drivers in Traffic Accidents | 6 |
| 4.1.2 | The Role of Young Human Drivers in Traffic Accidents | 6 |
| 4.1.3 | The Role of Unfocussed Human Drivers in Traffic Accidents | 6 |
| 4.2 | Ways Autonomous Vehicles may Cause Road Traffic Accidents | 7 |
| 4.2.1 | The role of Poor Communication in Traffic Accidents | 7 |
| 4.2.2 | The role of Computer Problems in Traffic Accidents | 7 |
| 4.3 | Discussion | 8 |
| 5 | Conclusion | 8 |
1.1 Purpose
The purpose of this paper is to raise awareness of the safety of autonomous vehicles because by using autonomous vehicles, people can reduce traffic accidents and can enable disabled people to travel on their own. Research in autonomous vehicles started in the late 1980s and since then, the safety level of autonomous vehicles has significantly increased.
1.2 Scope
In this research paper, I explain how autonomous vehicles work and then discuss the contributions of the VaMP and VITA II research project, DARPA (Defense Advanced Research Projects Agency) Grand Challenge races, and Google’s autonomous vehicle research program. Throughout the paper, I reference papers that were written after the DARPA Grand Challenge races as I discuss the main safety features of autonomous vehicles. I conclude the discussion by comparing the role of autonomous vehicles and humans in causing road traffic accidents.
1.3 Basic Design of an Autonomous Vehicle
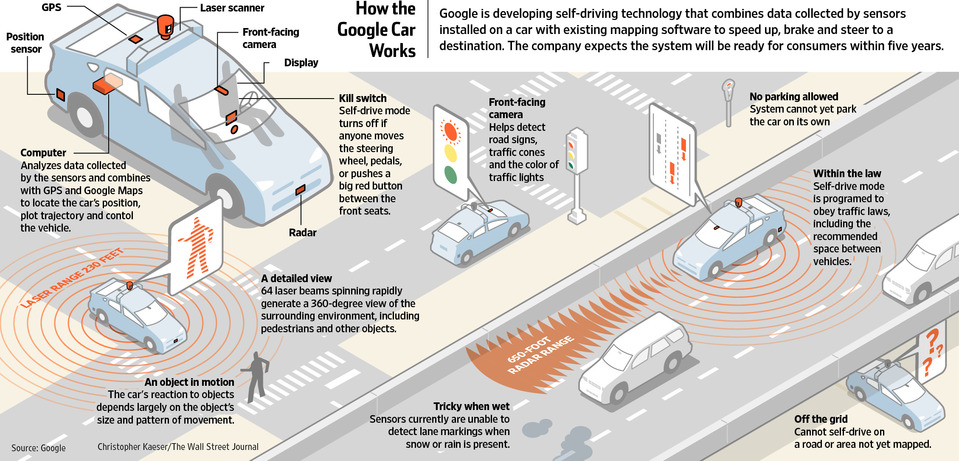
An autonomous vehicle is a car that is controlled by computers and is capable of driving without a human controlling it. The computers, which are located inside the vehicle, have two main functions; to obtain information from sensors about the immediate environment and to manipulate sensory information in order to generate commands that control the vehicle.
Sensors measure variables such as location, speed, amount of fuel, and temperature of the vehicle and the slope of the ground. In addition, sensors detect and measure speed and distance to nearby objects. In my research, I found two categories of sensors: external and internal sensors. External sensors measure changes in the environment such as speed of other vehicles and slope of the ground. Internal sensors measure the extent of processes happening inside the engine of the autonomous vehicle: for example, the speed at which the wheels are turning and the amount of fuel that is being used. After they have taken measurements, sensors transmit the sensory information to computers onboard the vehicle. [1], [2]
Computers use sensory information to understand the environment, and then they follow preloaded programs and maps to drive the autonomous vehicle safely. A human driver, called safety driver, is present in the autonomous vehicle in order to take control of the vehicle when there is an emergency situation.
1.0 The development of Autonomous vehicles
2.1 Introduction
I learned that the development of VaMP and VITA II, the DARPA Grand Challenge and the lobbying and research efforts of Google Inc. played a major role in the current research in autonomous vehicles.
2.2 Early Autonomous Vehicles: VaMP and VITA II
In the late 1980s, a team at Universität der Bundeswehr München in Germany developed two similar autonomous vehicles: namely, VaMP and VITA II. VaMP was successful in driving about 5,000 km autonomously on the Germany highways by using only two cameras as sensors. [3]
The first camera was located on the front of VaMP and the second one on the back. The cameras detected and tracked obstacles and road markings. Computers processed images from the two cameras to control VaMP to maintain or merge into other lanes, avoid crushes with other vehicles, and ask for assistance from a safety driver in difficult situations. [3]
The size of computers in the late 1980s and early 1990s could not handle difficult driving situations. As a result, the development of autonomous vehicles was slow until the DARPA Grand Challenge of 2004.
2.3 Autonomous Vehicles in DARPA Grand Challenge Races
In 2004, DARPA organized the first of three autonomous vehicle races (also known as DARPA Grand Challenges). The first race was on a 142-mi path which passed through Mojave desert. DARPA offered a financial reward to a team that would design a vehicle capable of autonomously navigating the desert environment in less than 10 hours. All the participating teams failed to finish the race. [4]
The second DARPA Grand Challenge race occurred in 2005, and the research teams had to design autonomous vehicles that could navigate 132 miles of desert environment within 10 hours. In this race, five autonomous vehicles safely completed the race. The fact that five vehicles completed the race proved that autonomous vehicles were indeed safe.
The third DARPA Grand challenge race was held in 2007, and the research teams had to design autonomous vehicles that could navigate a 97-km path that went through an urban environment in California [1]. The autonomous vehicles were required to drive safely, following California traffic rules. Before the race, teams were screened based on how safe and capable their autonomous vehicles were [2] .
After the third race, researchers and companies continued to develop autonomous vehicles for commercial and military purposes. Failures and successes from DARPA Grand Challenge races laid foundations for future development of autonomous vehicles.
2.4 Google’s Autonomous Vehicle Fleet
After his experience in the DARPA Grand challenge, Sebastian Thrun led a team at Google Inc. to design a fleet of autonomous vehicles capable of navigating urban environments [5]. Seven Google vehicles have safely traveled r more than 140,000 miles with minimum help from a safety driver. [5] . The safety of Google’s autonomous vehicles encouraged the company to lobby the state of Nevada to pass laws that legalize the use of autonomous vehicles in public roads.
In August 2011, Nevada passed legislation that legalizes the use of autonomous vehicle on public roads.
3.0 Safety Features in Autonomous Vehicles
3.1 Introduction
To drive safely on the roads, autonomous vehicles rely on the following features: (1) precise computer vision, (2) obstacle detection, (3) autonomous lane maintenance and merging, (4) vehicle-to-vehicle communication vehicles, and (5) integrated drivers’ manuals.
3.2 Vision Using 3-Dimensional Cameras in Autonomous Vehicles
Autonomous vehicles use front-facing cameras to enable them to track stationary and moving obstacles and determine the edges of the road. By tracking obstacles, autonomous vehicles avoid collisions with pedestrians, parked and moving vehicles, and construction equipment. [3], [1]
3.3 Obstacle Detection Using Scanning Lasers in Autonomous Vehicles
Scanning lasers are sensors that accurately measure the distance to nearby to obstacles. By scanning all directions around the autonomous vehicle, laser sensors provide information about the slope of the ground, and size and distance to obstacles up to 100 m in front of the vehicle [6]. Such information is crucial for the autonomous vehicle to avoid collisions, navigate irregular roads, and merging lanes.
3.3 Autonomous Lane Merging in Autonomous Vehicles
To merge into a lane, an autonomous vehicle uses sensory information to determine the size of available spaces in the surrounding lanes and the speed of nearby vehicles [1]. The next step is for the autonomous vehicle to decide which lane to merge into and how much to change its speed because it has to match the speed of vehicles in that lane.
3.5 Vehicle-to-Vehicle Communication in Autonomous Vehicles
Autonomous vehicles can communicate position, speed, and driving commands among each by using vehicle-to-vehicle (V2V) networks. V2V networks facilitate vehicles, both autonomous and human-driven vehicles, close to each other to communicate essential traffic information and then make coordinated decisions. If properly used, V2V networks can reduce collisions among autonomous vehicles. [7]
3.6 Integrated Drivers’ Manual in Autonomous Vehicles
Law enforcement agencies expect autonomous vehicles to follow traffic rules just like human drivers. In the third DARPA Grand Challenge race, autonomous vehicles were expected to follow California’s driving rules. As A result, designers embedded California driving rules in the computers of the autonomous vehicles and the vehicles followed the rules better than human drivers [1].
4.0 Comparison of Safety of Human Driving and Autonomous Driving
4.1 Ways that Human Drivers Cause Road Traffic Accidents
4.1.1 The Role of Intoxicated Human Drivers in Traffic Accidents
According to a report by the National Highway Traffic Safety Administration (NHTSA), more than 36 percent of total annual road accidents in the United States from 1994 to 2009 are linked to high alcohol consumption. Of the accidents caused by alcohol consumption, 59 percent of accidents were involved young people below the age of 34.[8]
4.1.2 The Role of Young Human Drivers in Traffic Accidents
Even without intoxication by alcohol, young drivers are still at a higher risk than older drivers of being involved in traffic accidents. In 2009, half of the accidents involving young drivers below the age of 34 were caused by over-speeding, [8].
4.1.3 The Role of Unfocussed Human Drivers in Traffic Accidents
Across all age groups, cell phone use while driving plays a significant role in distracting drivers and causing road traffic accidents. According to IIHS (Insurance Institute for Highway Safety), drivers who use phones while driving are at three times the risk of crashing in comparison to those who do not. Truck drivers who use phones while driving are at 23 times the risk of crashing compared to those who do not use phones. [9].
In response to the risk posed by phone use, 8 states banned the use of cellphones and 30 states banned texting while driving [10]. IIHS reports that these bans did not result in a significant drop in the number of road accidents because enforcing the bans is difficult for police officers [9].
4.2 Ways Autonomous Vehicles may Cause Road Traffic Accidents
4.2.1 The role of Poor Communication between Autonomous Vehicles and Human Drivers in Traffic Accidents
Currently, there is no communication between human drivers and autonomous vehicles. Human drivers and autonomous vehicles can fail to understand each other because of the lack of communication. Sometimes human drivers break traffic rules. Autonomous vehicles have a difficult task understanding the resultant unexpected driving behaviors of human drivers. Similarly, human drivers cannot easily understand how autonomous vehicles would behave at a given time. Unless there is communication, misunderstandings between autonomous vehicles and human drivers can lead to accidents. To solve this communication problem, some researchers have proposed the addition of a system that would present, to the human drivers, easy-to-read actions and perception of autonomous vehicles [11].
4.2.2 The role of Computer Problems in Traffic Accidents
Because the operation of autonomous vehicles is highly dependent on electronic devices, errors in sensors, computer algorithms and map databases can cause accidents. In my research, I did not find articles about accidents caused by malfunctioning computers, but I found a paper about a computer problem that had the potential to cause an accident. An autonomous vehicle competing in the third DARPA Grand Challenge race, Boss, had a malfunctioning GPS sensor because its signals were blocked by a large TV used at the race [1]. If the malfunction had occurred on a busy highway, Boss could have driven off the road and caused an accident.
To avoid accidents from sensor errors, researchers use redundancy [2]. “Redundancy” means that several sensors are used to measure the same variable of the environment, such that if one sensor is faulty, the autonomous vehicle still functions normally using information from the other sensors.
4.3 Discussion
Autonomous vehicles are safer than human driven vehicles. Although they may have small computer problems and communication problems, autonomous vehicles are not prone to the major causes of road traffic accidents: namely, alcohol intoxication, over-speeding, phoning while driving.
5.0 Conclusion
Researchers around the world have proved through VaMP and VITA II project, DARPA Grand Challenge races and Google’s research program that autonomous vehicles can independently and safely navigate on public roads. Based on the proven safety of the vehicles and efforts by Google, the state of Nevada legalized the use of autonomous vehicles on public roads. I think in the next few years, more states will start legalizing the use of autonomous vehicles, and autonomous vehicles will be widely used by the public. People can send autonomous vehicles to places, such as mines, that would otherwise be dangerous for humans and disabled people can ride autonomous vehicle by themselves.
Once states legalize autonomous vehicles, vehicle manufactures can simply add more sensors and computers to convert human-driven vehicles into autonomous vehicles. Most modern passenger and commercial vehicles already have the capability of being driven by computers [12]. Autonomous vehicles will change the way people travel for the better.
References
| [1] | C. Urmson,et al, “Autonomous driving in urban environments: Boss and the Urban Challenge,” Journal of Field Robotics, vol. 25, pp. 425-66, 08, 2008. |
| [2] | U. Ozguner, C. Stiller and K. Redmill, “Systems for safety and autonomous behavior in cars: The DARPA grand challenge experience,” Proc IEEE, vol. 95, pp. 397-412, 2007. |
| [3] | M. Maurer, et al,”A compact vision system for road vehicle guidance,” in Proceedings of 13th International Conference on Pattern Recognition, 1996, pp. 313-17. |
| [4] | S. Thrun, “Teaching challenge,” IEEE Robotics & Automation Magazine, vol. 13, pp. 12, 14, 12, 2006. |
| [5] | J. Markoff. Google cars drive themselves, in traffic. New York Times[Online]. Science2010. Available: Link. |
| [6] | M. Montemerlo, et al, “Junior: the Stanford entry in the urban challenge,” Journal of Field Robotics, vol. 25, pp. 569-97, 2008. |
| [7] | O. Risan and E. Peytchev, “A vehicle-to-vehicle communication protocol for collaborative identification of urban traffic conditions,” in 2nd International Conference on Ad Hoc Networks, ADHOCNETS 2010, August 18, 2010 – August 20, 2010, pp. 482-494. |
| [8] | National Highway Traffic Safety Administration. Fatality analysis reporting system general estimates system: 2009 DATA SUMMARY. National. USA. 2011[Online]. Available: Link. |
| [9] | Anonymous. Phoning while driving. Insurance Institute for Highway Safety. Arlington, VA, USA. 2009[Online]. Available: Link. |
| [10] | A. Lund, “Increase in Accidents Since Ban on Texting,” Risk Management, vol. 57, pp. 44, 12, 2010. |
| [11] | S. Kraus, M. Althoff, B. Heissing and M. Buss, “Cognition and emotion in autonomous cars,” in 2009 IEEE Intelligent Vehicles Symposium (IV), 2009, pp. 635-40. |
| [12] | E. S. Mausner, “Drive-by-wire systems for commercial vehicles and passenger cars-present status and future perspective,” in Automotive Electronics, 1989, pp. 247-58. |